ML study > Object Detection > Two stage detection
Faster R-CNN
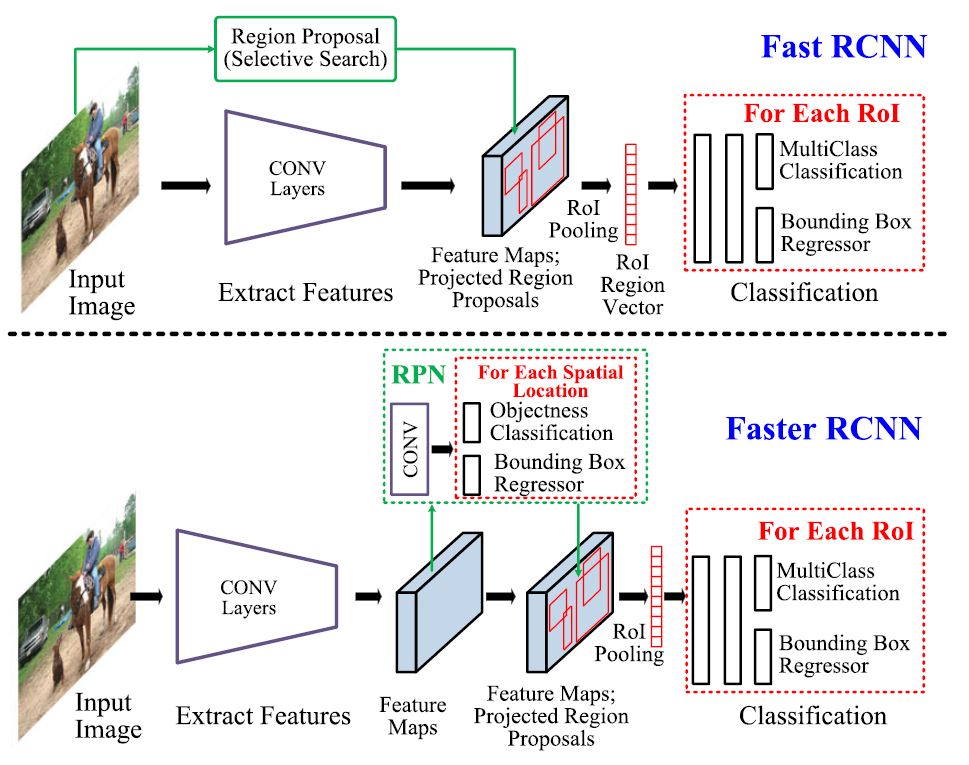
- Fast R-CNN까지 region proposal로 selective search (SS) 알고리즘을 사용하였지만 CNN이 feature를 뽑아내는데에 큰 성공을 거두면서 Faster R-CNN에서는 SS 대신 region proposal network (RPN) 를 적용하여 object detection을 구현하였다.
1. Faster R-CNN 동작
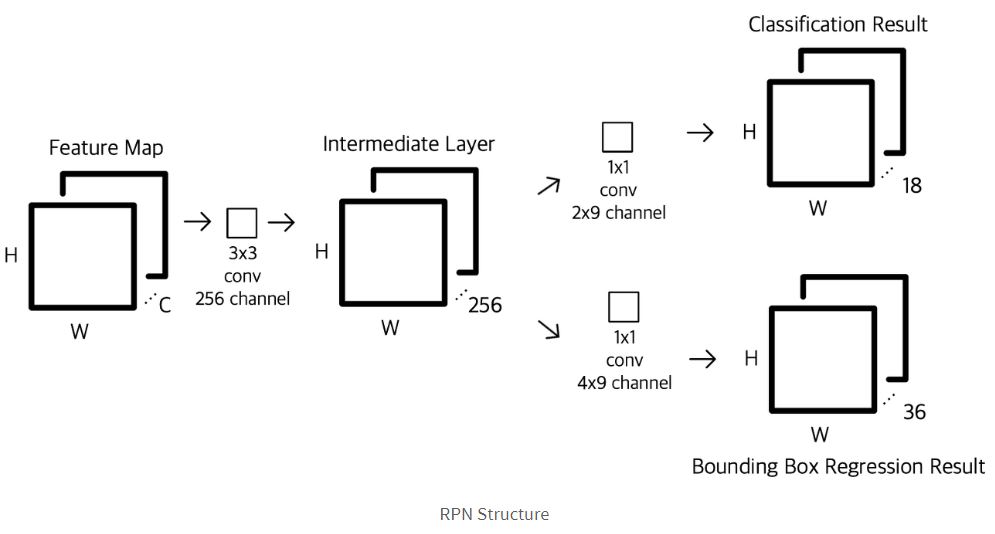
- RPN은 그림과 같이 feature map의 한 포인트에서 anchor라고 불리는 k개의 서로다른 크기와 비율을 가진 reference box를 만들고 anchor에 물체가 존재할 확률과 anchor box를 regression 해주는 2개의 output layer로 구성하여 training 한다. 앵커의 개수를 9개를 예를 들면 구체적인 동작은 다음과 같다.
-
먼저 RPN은 동일한 backbone CNN network의 feature를 input으로 받는다.
-
feature map (HxWxC) 을 CNN에 통과시켜 2개의 output layer가 HxWx2k, HxWx4k 가 되도록 구현한다.
-
첫번째 layer는 feature map의 한 point에서 만들어낸 k anchor box에 object가 있을 확률을 의미하며, 두 번째 layer는 anchor box를 regression 해줄 좌표, 크기 정보를 의미한다.
-
이 때 동일한 물체에 대해 여러개의 box가 나올 수 있으므로 물체가 있을 확률이 높은 순서대로 정렬한 후 Non maximum suppression (NMS) 을 적용하여 총 2000개의 ROI 만을 구해준다.
-
이 후의 과정은 Fast R-CNN과 동일하다.
2. Faster R-CNN 결과
Faster R-CNN은 region proposal을 CNN으로 대체하며 mAP 성능을 올렸을 뿐 아니라 Test time에서는 Fast R-CNN보다 10배 더 좋은 속도를 기록하였다.

3. Faster R-CNN 단점
- Region proposal까지 CNN에 적용하여 성능향상을 가져왔지만 이미지마다 진행된 수백 수천 개의 ROI에 대하여 sub network를 통과시켜야 한다는 점이 문제점으로 거론되었다.
Reference
[1]: Deep Learning for Generic Object Detection: A Survey
[2]: Faster R-CNN 논문
[2]: Faster R-CNN 정리 블로그
댓글남기기