ML study > Object Detection > One stage detection
DSSD
- SSD가 기존 YOLO 보다 높은 mAP와 속도를 얻었지만 여전히 작은 물체에 대해서는 성능이 좋지 못하다 판단하여 backbone network를 변경하고 deconvolutional detector를 적용함으로써 mAP를 개선시켰다.
1. DSSD 동작
- 우선 기존 SSD에서 사용되었던 VGG network를 조금 더 좋은 성능을 보이는 Residual-101 network로 교체하였다.
-
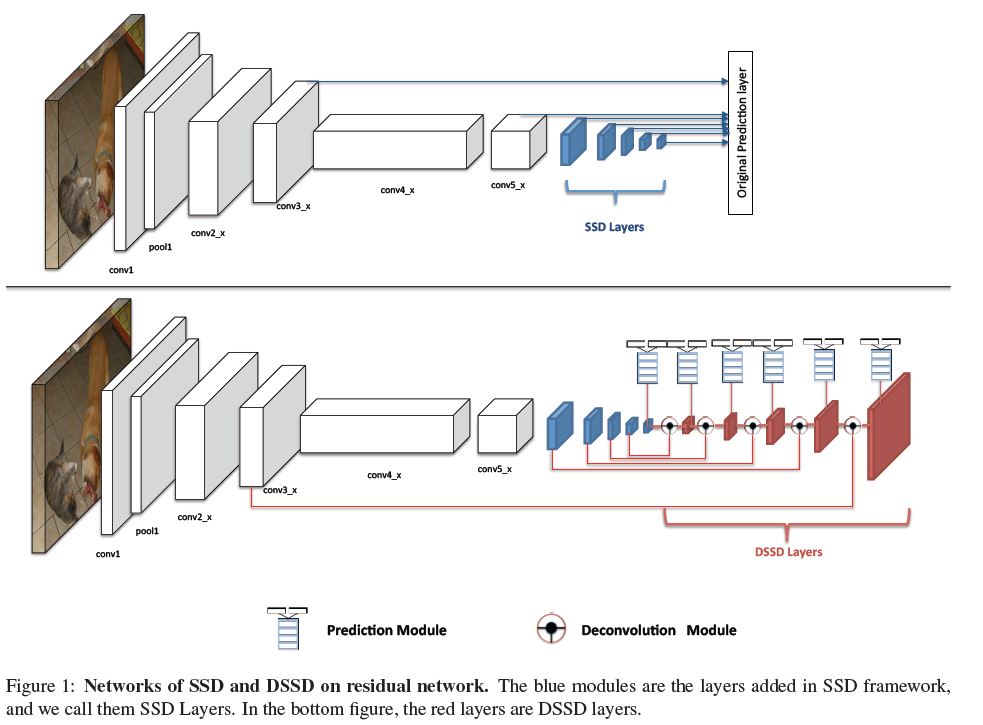
위 그림은 SSD와 DSSD의 network 차이를 나타낸 그림이다. 첫 번째 SSD에서는 backbone layer를 지나 다양한 feature map에서 detection이 일어나는 방식이었다.
-
반면 DSSD는 deconvolutional network까지 추가하여 성능향상을 이루었다.
1.1 Prediction Module
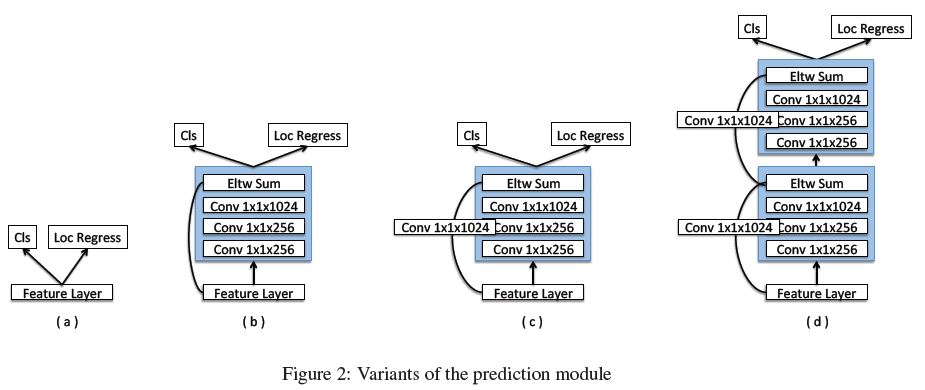
- Prediction module 로는 기존의 SSD module (a) 와 residual path를 추가해가며 module (b)-(d)를 만들어 성능을 비교했으며 (c)에서 가장 좋은 성능을 보였다.
1.2 Deconvolution Module
- Deconvolution module는 feature map을 deconvolution network로 upsampling하고 이전의 feature map과 합치는 방식으로 두 개의 feature map을 합칠 때 elementwise sum 과 product 방식을 나누어 실험하였고 product 방식의 결과가 더 좋게 나왔다.
1.3 Training
- training 과정은 SSD와 동일하며 추가적으로 default box aspect ratio를 설정하는 과정에서 k-means clustering을 통해 결정하였다.
2. DSSD 결과
-
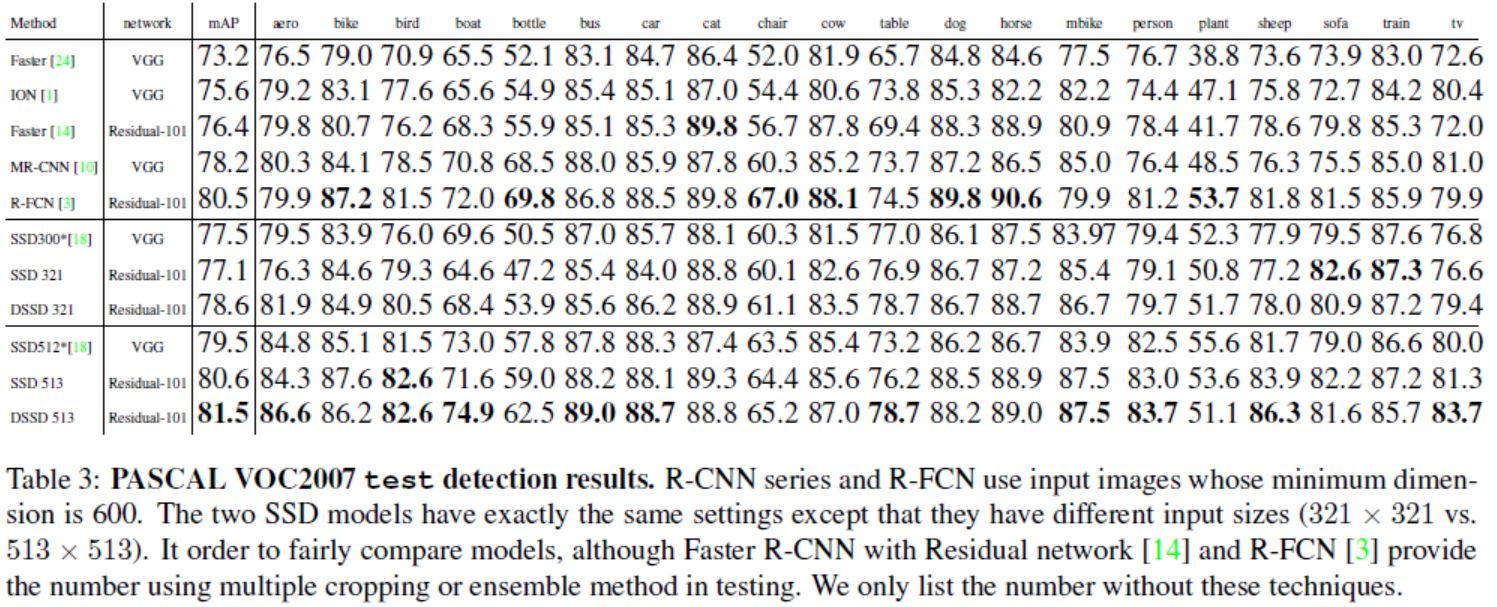
PASCAL VOC 2007에 대해서 실험한 결과 DSSD에서 mAP 성능이 가장 좋게 나옴을 확인할 수 있다.
-
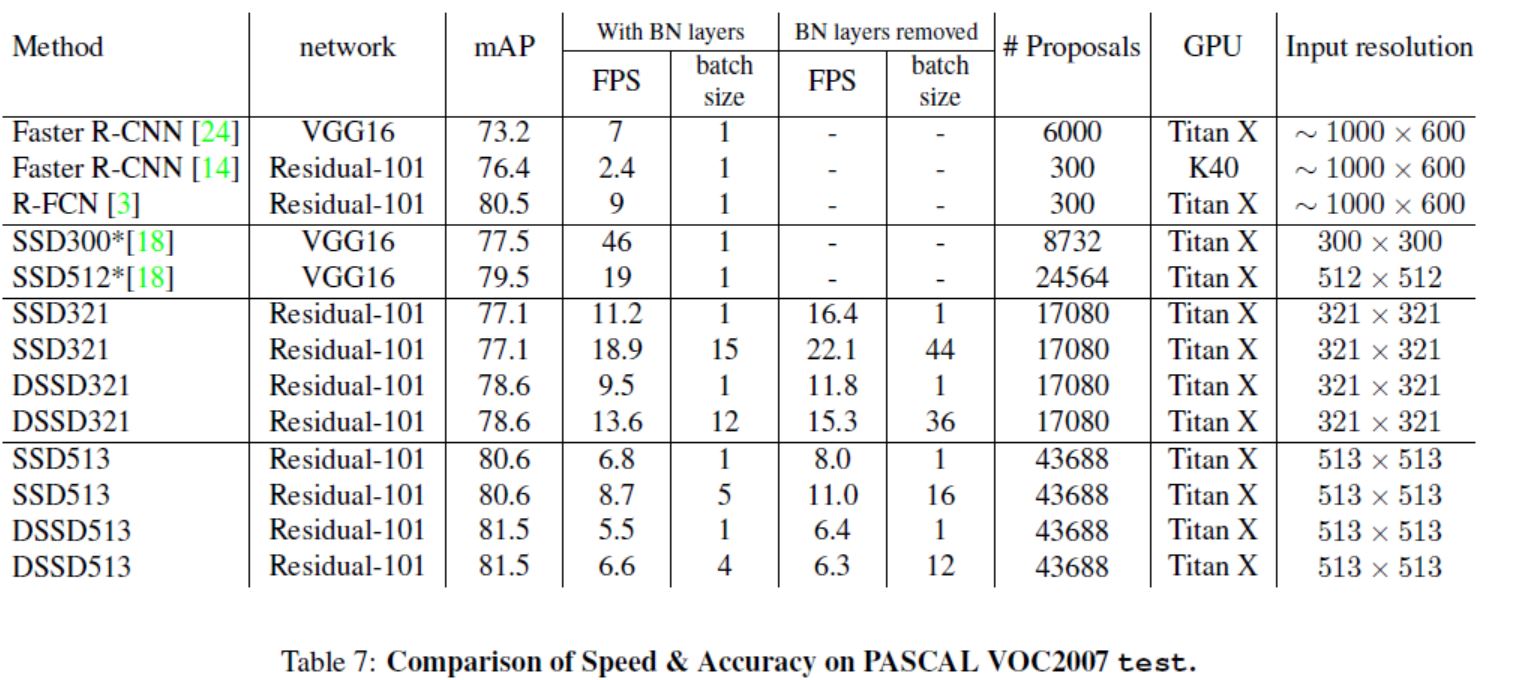
속도 측면에서는 SSD 보다도 떨어지는 아쉬운 모습이다.
Reference
[1]: DSSD
댓글남기기